-
题目大意
- 我们已经学会了 N 种不同的游泳技术。对于每种技术 \(i\) ,每秒前进 \(A_{i}\) 米,并消耗 \(B_{i}\) 单位的体力。注意,我们可以任意调整每种技术的使用时长 \(t_i\) ,其中 \(t_i\) 是一个实数
- 现在,我们面临 \(Q\) 次询问,每次询问指定距离终点的距离 \(C_j\) 和体力限制 \(D_j\) 。我们需要确定是否在体力限制下到达终点。如果可以,求出所需的最短时间。
- (符号使用与原题略有差异)
- 数据规模:
- \(1 <= N, Q <= 2 \times 10^5\)
- \(1 <= A_i, B_i, C_j, D_j <= 10^9\)
-
题目分析
- 鉴于数据规模庞大,并且时间 \(t_i\) 是实数,传统的动态规划方法不适用。在处理每次询问时,我们需要同时考虑距离、体力和时间三个变量。一个有效的方法是转化这些变量为单位时间内的距离(即速度)和单位时间内的体力消耗。如果单位时间内的距离大于单位时间内的体力消耗,那么理论上我们可以到达终点。接下来的目标是在所有可能的情况中找到最大的速度,作为最终答案。
以两种游泳技术(N=2)为例进行具体分析。假设在总游泳时间中,技术1和技术2的使用时间比例分别为 \(p\) 和 \(1-p\) (其中 \(0 \leq p \leq 1\) )。在这种情况下,每秒前进距离为 \(A_1 \cdot p + A_2 \cdot (1 - p)\) ,体力消耗为 \(B_1 \cdot p + B_2 \cdot (1 - p)\) 。
从几何角度看,组合这两种游泳技术的速度与体力消耗 \((A_x, B_x)\) 为 \((A_1, B_1) \cdot p\) 和 \((A_2, B_2) \cdot (1 - p)\) 的向量和,其可能的取值位于以 \((A_1, B_1)\) 和 \((A_2, B_2)\) 为端点的线段上的任意一点。
对于具体询问 \((C_i, D_i)\) ,为了确保“在到达终点之前不能耗尽体力”,我们需要找到的点必须位于斜率为 \(D_i/C_i\) 的射线与x轴之间的夹角内。通过这种方式,我们可以确定是否有可能在给定的体力限制下完成指定的距离,并找到速度最快的点。 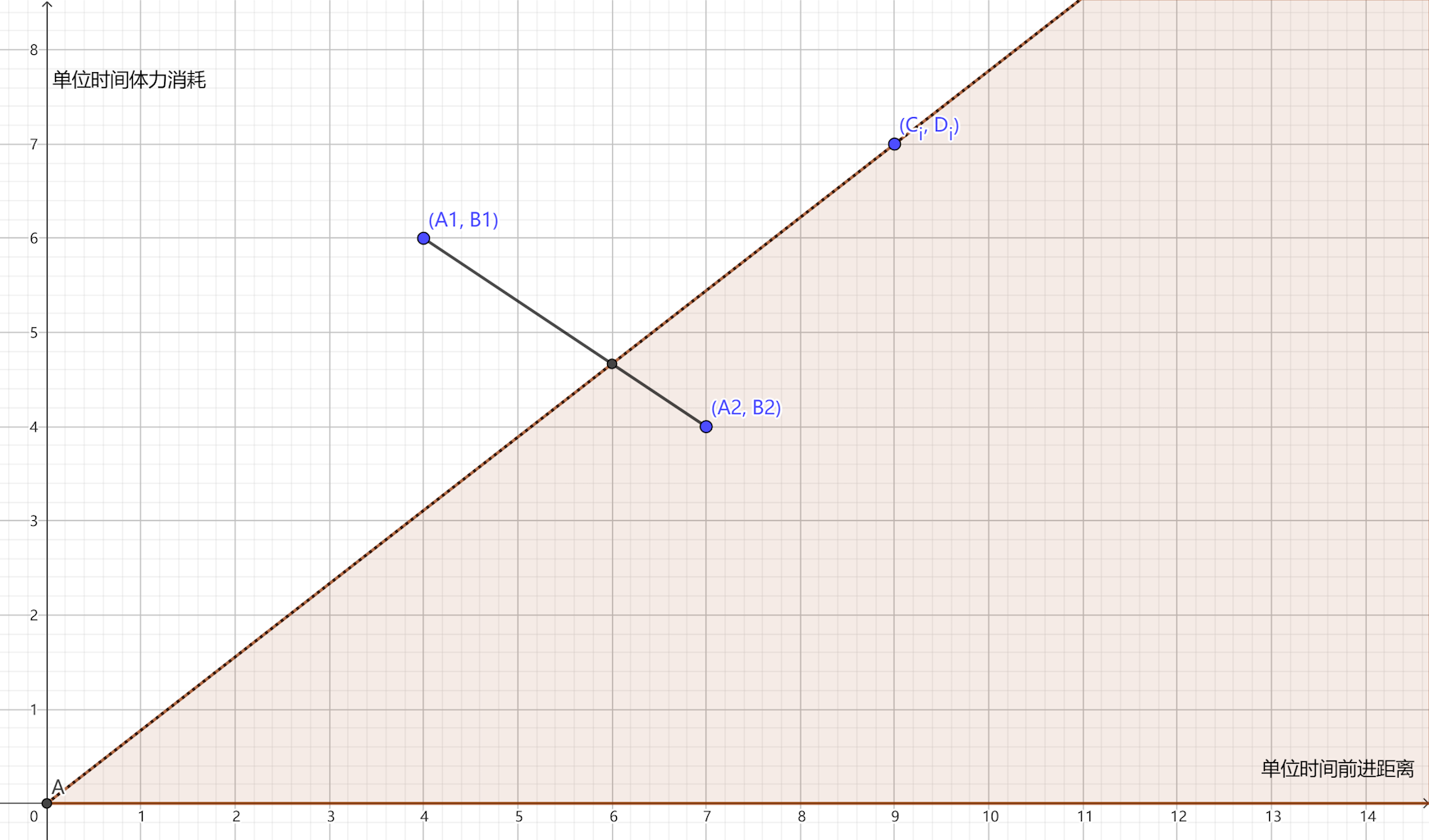
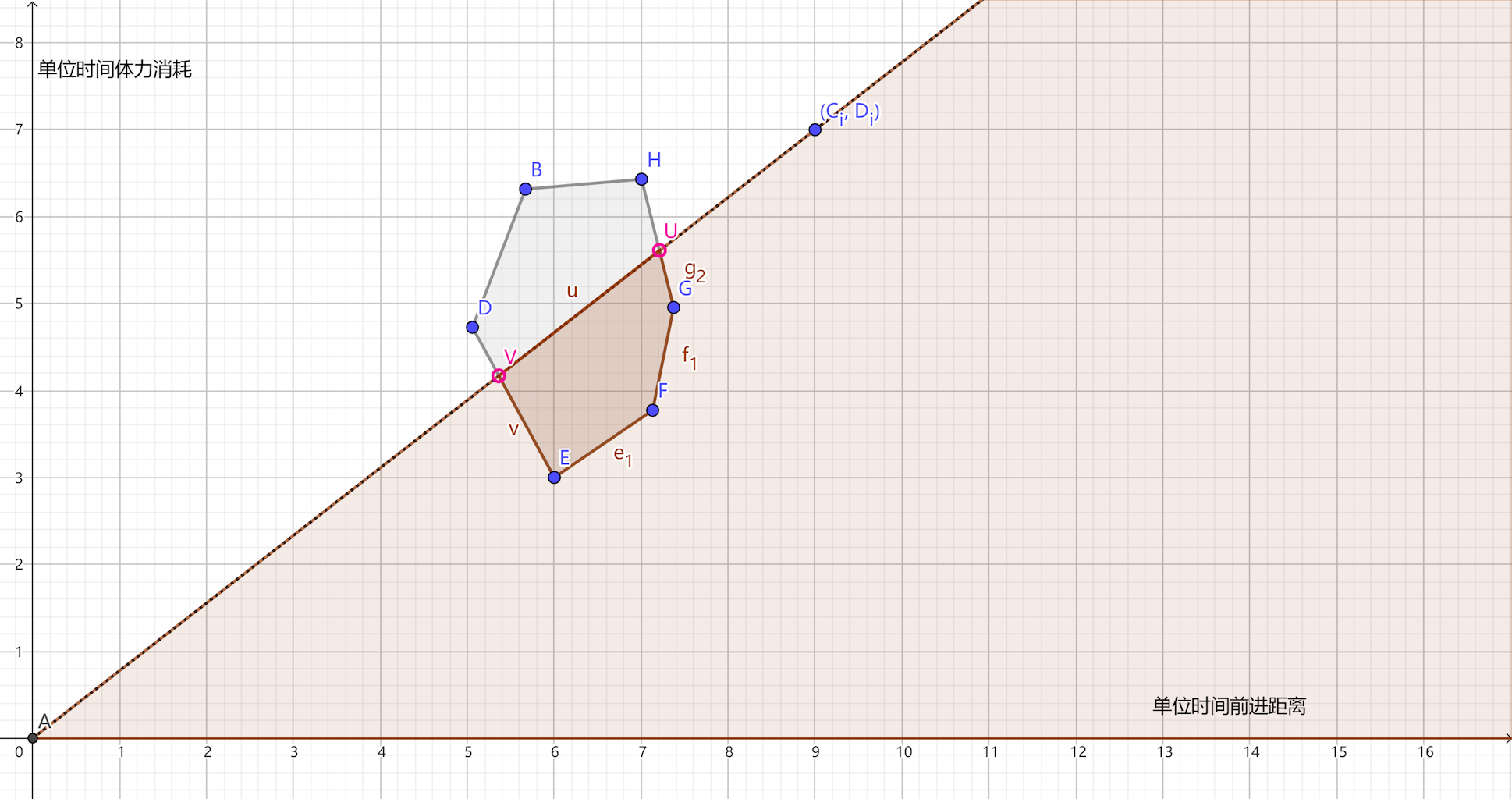
- 对于多种游泳技术的组合,情况会更复杂一些。我们将所有游泳技术视为一组向量 \((A_1, B_1), (A_2, B_2), \ldots, (A_n, B_n)\) 和一组对应的权重 \(p_1, p_2, \ldots, p_n\) ,其中 \(\sum_{i=1}^n p_i = 1\) 并且每个 \(p_i \geq 0\) ,那么这些向量的加权和 \(\sum_{i=1}^n p_i (A_i, B_i)\) 定义了一个在二维空间中的凸多边形,称为这些向量的凸包。
- 我们可以用稍微详细一点的数学来解释这一过程:
-
向量的线性组合
- 首先,定义向量 \(\mathbf{v}_1, \mathbf{v}_2, \ldots, \mathbf{v}_n\) 在二维空间中的位置。每个向量 \(\mathbf{v}_i\) 可以表示为从原点到点 \((x_i, y_i)\) 的箭头。
当我们考虑这些向量的线性组合时: \(\sum_{i=1}^n \lambda_i \mathbf{v}_i\)
其中,每个 \(\lambda_i\) 是一个实数系数,我们实际上在描述一个新向量,这个向量是通过在每个原向量上“拉伸”或“压缩”(取决于 \(\lambda_i\) 的正负和大小),然后将结果相加得到的。这种线性组合在几何上定义了一个点的集合。
- 首先,定义向量 \(\mathbf{v}_1, \mathbf{v}_2, \ldots, \mathbf{v}_n\) 在二维空间中的位置。每个向量 \(\mathbf{v}_i\) 可以表示为从原点到点 \((x_i, y_i)\) 的箭头。
-
凸组合与凸多边形
- 当这些系数 \(\lambda_i\) 都非负且和为1(即 \(\lambda_i \geq 0\) 且 \(\sum_{i=1}^n \lambda_i = 1\) ),我们称这样的线性组合为凸组合。凸组合具有重要的几何特性:它定义的点一定位于这些向量端点所形成的凸多边形内部或边界上。
-
凸多边形的形成
-
- 边界的构成:如果你只考虑两个向量 \(\mathbf{v}_1\) 和 \(\mathbf{v}_2\) ,那么它们的凸组合会形成一条连接两点 \((x_1, y_1)\) 和 \((x_2, y_2)\) 的线段。这条线段是直线,因为所有的组合点都直接通过两点间的直线路径互相连结。
-
- 扩展到多个向量:当你有三个或更多向量时,通过考虑任意两个向量的所有凸组合(即所有可能的线段),然后再将这些线段的结果进行组合,最终你将覆盖一个多边形区域。这个区域是由最外围的向量点定义的,这些点在几何上构成了凸多边形的顶点。
-
- 数学描述:在数学上,这个区域可以看作是所有可能的 \(\lambda_i\) 值(符合凸组合条件)下的 \(\sum_{i=1}^n \lambda_i \mathbf{v}_i\) 的集合。由于每个 \(\lambda_i\) 都保证非负且和为1,凸多边形的任意内部或边界点都可以通过这样的组合表示,且不会有任何点“凸出”于这个定义的多边形之外,这正是凸性质的体现。
-
-
- 类似于仅涉及两个点的简单情况,为了解决问题,我们需要找到凸多边形内与 \(x\) 轴之间斜率为 \(D_i/C_i\) 的射线包围的区域(即凸包中的深色部分)。我们进一步需要找出该部分中在 \(x\) 轴上取得最大值的点。
- 鉴于数据规模庞大,并且时间 \(t_i\) 是实数,传统的动态规划方法不适用。在处理每次询问时,我们需要同时考虑距离、体力和时间三个变量。一个有效的方法是转化这些变量为单位时间内的距离(即速度)和单位时间内的体力消耗。如果单位时间内的距离大于单位时间内的体力消耗,那么理论上我们可以到达终点。接下来的目标是在所有可能的情况中找到最大的速度,作为最终答案。
-
代码实现 - 并不高效
-
实现步骤
- 求出所有 \((A_i, B_i)\) 点所构成的凸包
- 对于每一个查询Q,从零点画出斜率为 \(D_i / C_i\) 的射线
- 如果凸包位于射线的“上方”,则没有满足条件的情况,返回-1
- 如果凸包位于射线的“下方”或与射线相交,则需要找到凸包在射线“下方” \(B_i\) 值最大的点。意味着这个组合可以成功到达终点,并且平均速度最快
-
复杂度分析
- 对于每一次查询,我们都要遍历凸包的所有边(即“凸包壳”)与射线的交点。时间复杂度 \(O(n)\) 。
- 对于所有查询,时间复杂度为 \(O(q * n)\) ,明显是会超时的。
-
-
优化的可能性
- 易知,并不是凸包的所有部分都能得出最优解。与原点连线斜率越小的点,其“性价比”越高,即在消耗更少的体力的同时,可以游更远的距离。
同时,如果凸包内部的某一个点满足条件,则总有位于凸包壳上面的另一个点与它更优。同样,如果凸包壳上有两个点的斜率相同,那么 \(B_i\) 值更大的点是更优的。
所以优化的目标在于找到一系列凸包壳,使其可以只保留最优解所在的边,并且排除所有非最优的情况。
我们可以从“性价比”最好的点开始,因为对于一个查询,如果所需要的“性价比”高于我们所有的选项,那么一定没有解。
然后我们逆时针遍历所有点,直到找到 \(B_i\) 值最大的点,因为对于一个查询,在满足“性价比”的情况下,这是我们能给出的,消耗时间最小的答案。 -
实现方案1:
- 我们可以使用凸包算法,找到凸包壳,按照上文所述的方法,找到斜率最小(所谓“性价比最高”)的点,然后逆时针遍历到 \(B_i\) 最大的点。这些点必然以斜率从小到大排序。
对于一个查询 \((C_i, D_i)\) ,我们将其视为斜率为 \(D_i / C_i\) 的射线。我们使用二分法,找到与该射线相交的凸包壳边。再通过联立方程方法找到其交点 \((A_x, B_x)\) ,其中 \(A_x\) 即为满足查询条件的最大游泳速度。
- 我们可以使用凸包算法,找到凸包壳,按照上文所述的方法,找到斜率最小(所谓“性价比最高”)的点,然后逆时针遍历到 \(B_i\) 最大的点。这些点必然以斜率从小到大排序。
-
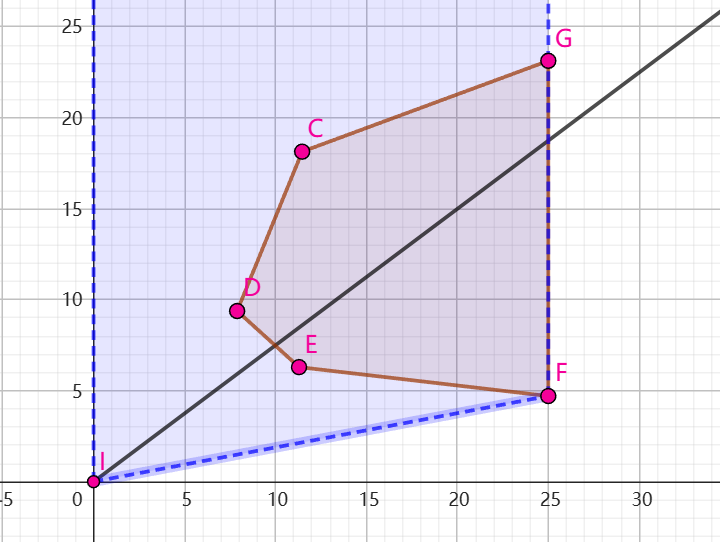
实现方案2:
- 方案2与方案1类似,只是在查找凸包的时候,加入点 \((0, 0)\) 与点 \((max(A_i), INF)\) 。如下图所示,加入这两个点之后,非最优解的点都被包含在了凸包(蓝色)内部。我们在找到凸包之后,将加入的点删除,并按方案1的方法排序。后续再进行二分,以及求交点等操作。
- 易知,并不是凸包的所有部分都能得出最优解。与原点连线斜率越小的点,其“性价比”越高,即在消耗更少的体力的同时,可以游更远的距离。
-
代码实现
-
感悟
- 别调计算几何,会变的不幸(
Comments
comments powered by Disqus